Traditionally, Linux-based applications have been built using GNU tools. Even today, Bluewater uses mostly GNU tools for application development, and always for the Linux kernel. For many years, Symbian used the GNU tools also. The rationale was that GNU tools are cheap and functional, and allow access to the widest possible developer base. However, this strategy broke with companies like Nokia and Ericsson. These companies were very happy with the idea of investing significant sums of money in better tools, and regarded the use of GNU as a missed opportunity. Symbian has therefore moved to a dual approach, with serious developers using RealView and casual developers using GNU. The benefits of RealView include a better compiler (faster and smaller code, more features, better documentation) and better debugging support. Microsoft has followed a different approach with Windows CE. Microsoft uses their own compiler with a number of vendor-specific extensions, and has little interest in encouraging other tools vendors. While this approach provides a highly functional, customised and integrated IDE, it forces customers to rely on the Microsoft ARM compiler, which is not exactly the best in the world. It seems that Linux is moving to the dual-tools approach used by Symbian. This will offer the best of both worlds - low cost GNU tools and highly functional RealView tools. To illustrate the potential benefits, recently we build a bayer filter algorithm with both GNU and RealView. This was for our Bigeye Camera project. The RealView-compiled code executed in about 400ms, versus 1.7 seconds for GNU, so RealView code was 4 times faster! This is an extreme case (other results show around a 10-20% benefit) but it does illustrate the potential benefits of using RealView. A few years ago ARM introduced a --gnu flag into their RealView compiler. Using this, Bluewater Systems has written an applications note for ARM on how to build application software and libraries for Linux using RealView. Today, building Linux applications using RealView requires a fair bit of fiddling, and detailed tools knowledge. But ARM is working on this, as evidenced by the better support in each release for the last several years. The goal seems to be to replace GNU entirely in the tools chain. Bluewater uses RealView tools for bringup, debugging Linux kernels and for debugging WinCE via EXDI2. Our engineers are itching to get a better development environment (particularly in debug) than that offered by GNU. We already have a foot in the water in this area. The next major step for us will be building our Snapper-targeted OpenEmbedded release using RealView. Time frames are unclear at the moment, but even with the current RealView tools we have been able to develop a script which handles translation of most common command-line arguments. The next 12 months should see a big leap forward in Linux tools support, and resulting software performance and engineer productivity. We will keep you posted on our progress. Availability of RealView tools looks like it's becoming a key benefit of using Linux.

I2C DevicesPosted in Uncategorized on September 18, 2008 by Administrator When building embedded devices, one of the fundamental activities we do is coupling [suitable CPU A] with [selection of special-purpose peripherals B]. This gets you from having a feature-rich (but boring) SOM to a specialised device offered a wide range of sensory inputs and options. Being an embedded platform however, complexity, pin counts and space is at a premium - so instead of the more powerful IDE, PCI, PCIe or similar interfaces, words like I2C, SPI and RS232 tend to crop up a lot. In this note, I'd like to focus on I2C.
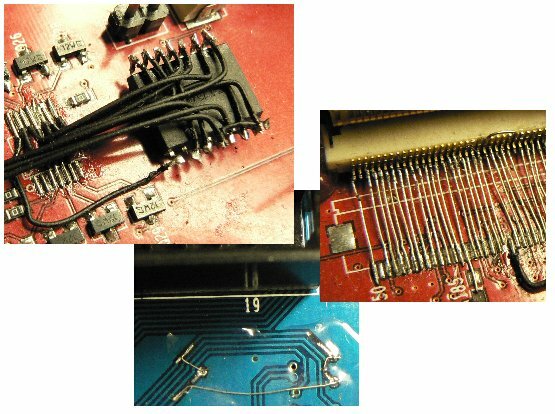
Debugging Windows CE 6.0 with the RealView ICEPosted in Uncategorized on September 16, 2008 by Administrator The secret to maximising your productivity is ensuring you have the correct tools for the job. When it comes to bringing up a new kernel for a processor that you have not supported before, an embedded ICE is a must have. Before now Windows CE has lacked a set of high quality tools for kernel bringup. Normally the first step in CE development is the creation of a the Kernel Independent Transport Layer (KITL) so that you can debug your kernel drivers over Ethernet. The problem with this is that you need a large portion of the kernel and Ethernet driver to be working before you can do any debugging. As soon as any problems occur in the kernel, the entire debugging session locks up. We have been lucky as an ARM tools distributer to be able to trial a pre-beta version of the Windows CE 6.0 eXDI2 drivers for the Real View ICE. The driver plugs directly into Visual Studio and provides source level kernel debugging of an embedded platform as if it was a desktop application. It has allowed us to single step through the kernel of our AT91SAM9260 platform before the kernel was up and running. No longer do we need to toggle LED's in a seemingly random sequence of pulses to indicate boot progress! ARM's Next FrontierPosted in Uncategorized on September 15, 2008 by Administrator Two of us are attending an ARM meeting in Hong Kong this week. There is a quite a large turn-out of companies across Asia including Singapore, Taiwan, China, Korea, and of course New Zealand. What struck me as I looked at the group about to go out for dinner last night, was that there were more people there among ARM's tools distributors in just a single region, than worked for ARM in total when I joined just 14 years ago. ARM shipments passed the 10 billion mark last year and the current run rate is over 3 billion per annum. Of interest particularly is the massive growth in low-end ARM micros. The Cortex-M3 is 'only' shipping about a quarter of a billion units per annum, but volume is more than doubling each year. When the $1 micro was announced I wrote a short paper about the possible impact (available here). It seems that ARM is well on the way to making good on some of the benefits identified, particularly in terms of quality of tools, and the productivity of engineers developing with low-end microcontroller technology. Bluewater & Prototype ManufacturingPosted in Hardware design on September 10, 2008 by Daniel Keis For designs to become reality, they need to go through the prototype stage. Very few designs of high complexity will work the first time, hindsight is normally 20:20. Since most of the work performed by us utilises high-density miniature components on multi-layer boards, we have developed techniques to rework boards in such a fashion that we can test our changes before producing the next revision. Prototype designs often include provision for modification and adjustment through resistor fitment options. If this is not the case then PCB tracks need to be cut and wires placed to rewire the tracks. These are normally kept as short as possible and fitted in such a way that no components are covered, allowing further rework to be carried out if required. Solder mask can be scratched off to allow connection to otherwise normally non-accessible areas of the board. Chip legs can be lifted without removal of the pa to allow reconnection of both pin and pad if required. In extreme cases (very rare) we have replaced components with different footprints and pin outs and got these working before using them in the next revision. As these required modifications are not known before going to manufacture, some demanding but interesting modifications have been made without any fear of harming the prototypes.
|